有没有相关的论文或文献参考?
这个数据集是基于什么背景创建的?
数据集的作者是谁?
能帮我联系到这个数据集的作者吗?
这个数据集如何下载?
该数据集包含超过5000条随机无人机(UAV)轨迹,收集自20小时的飞行时间。旨在用于训练如轨迹预测应用等AI模型。数据集通过自动化流水线生成和预处理无人机合成轨迹,可直接用于AI模型训练。
数据集包含遵循预定义模式的参数化轨迹,特别是圆形和类似无限符号的路径。
timestamp:数据点的记录时间。position:无人机的3D位置(x, y, z坐标)。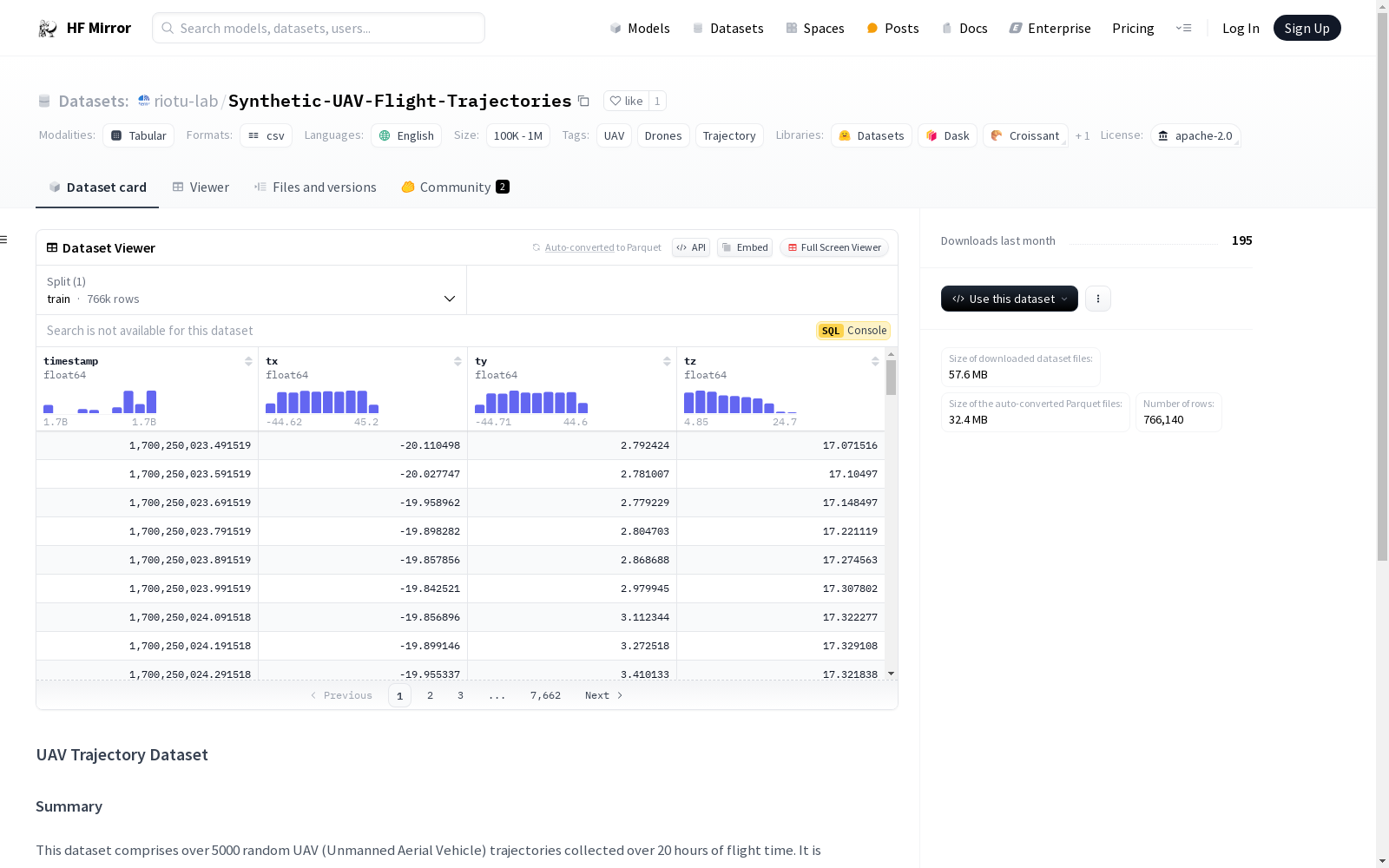
中国区域交通网络数据集
该数据集包含中国各区域的交通网络信息,包括道路、铁路、航空和水路等多种交通方式的网络结构和连接关系。数据集详细记录了各交通节点的位置、交通线路的类型、长度、容量以及相关的交通流量信息。
data.stats.gov.cn 收录
学生课堂行为数据集 (SCB-dataset3)
学生课堂行为数据集(SCB-dataset3)由成都东软学院创建,包含5686张图像和45578个标签,重点关注六种行为:举手、阅读、写作、使用手机、低头和趴桌。数据集覆盖从幼儿园到大学的不同场景,通过YOLOv5、YOLOv7和YOLOv8算法评估,平均精度达到80.3%。该数据集旨在为学生行为检测研究提供坚实基础,解决教育领域中学生行为数据集的缺乏问题。
arXiv 收录
中国交通事故深度调查(CIDAS)数据集
交通事故深度调查数据通过采用科学系统方法现场调查中国道路上实际发生交通事故相关的道路环境、道路交通行为、车辆损坏、人员损伤信息,以探究碰撞事故中车损和人伤机理。目前已积累深度调查事故10000余例,单个案例信息包含人、车 、路和环境多维信息组成的3000多个字段。该数据集可作为深入分析中国道路交通事故工况特征,探索事故预防和损伤防护措施的关键数据源,为制定汽车安全法规和标准、完善汽车测评试验规程、
北方大数据交易中心 收录
中国知识产权局专利数据库
该数据集包含了中国知识产权局发布的专利信息,涵盖了专利的申请、授权、转让等详细记录。数据内容包括专利号、申请人、发明人、申请日期、授权日期、专利摘要等。
www.cnipa.gov.cn 收录
RML24
RML24是首个专门为卫星信号识别和解调的深度学习应用设计的数据集。它整合了遥测和通信信号在遥测、跟踪和指挥(TT&C)系统中,并模拟了真实卫星信道中的信号损伤效应。该数据集利用软件定义无线电(SDR)平台和射频(RF)收发器进行严格的空中测量,并验证收集的数据。RML24为研究人员提供了基本的数据和建模基准,以促进智能和自适应卫星通信系统的算法验证和发展,推动数据驱动卫星通信技术的发展。
github 收录