有没有相关的论文或文献参考?
这个数据集是基于什么背景创建的?
数据集的作者是谁?
能帮我联系到这个数据集的作者吗?
这个数据集如何下载?
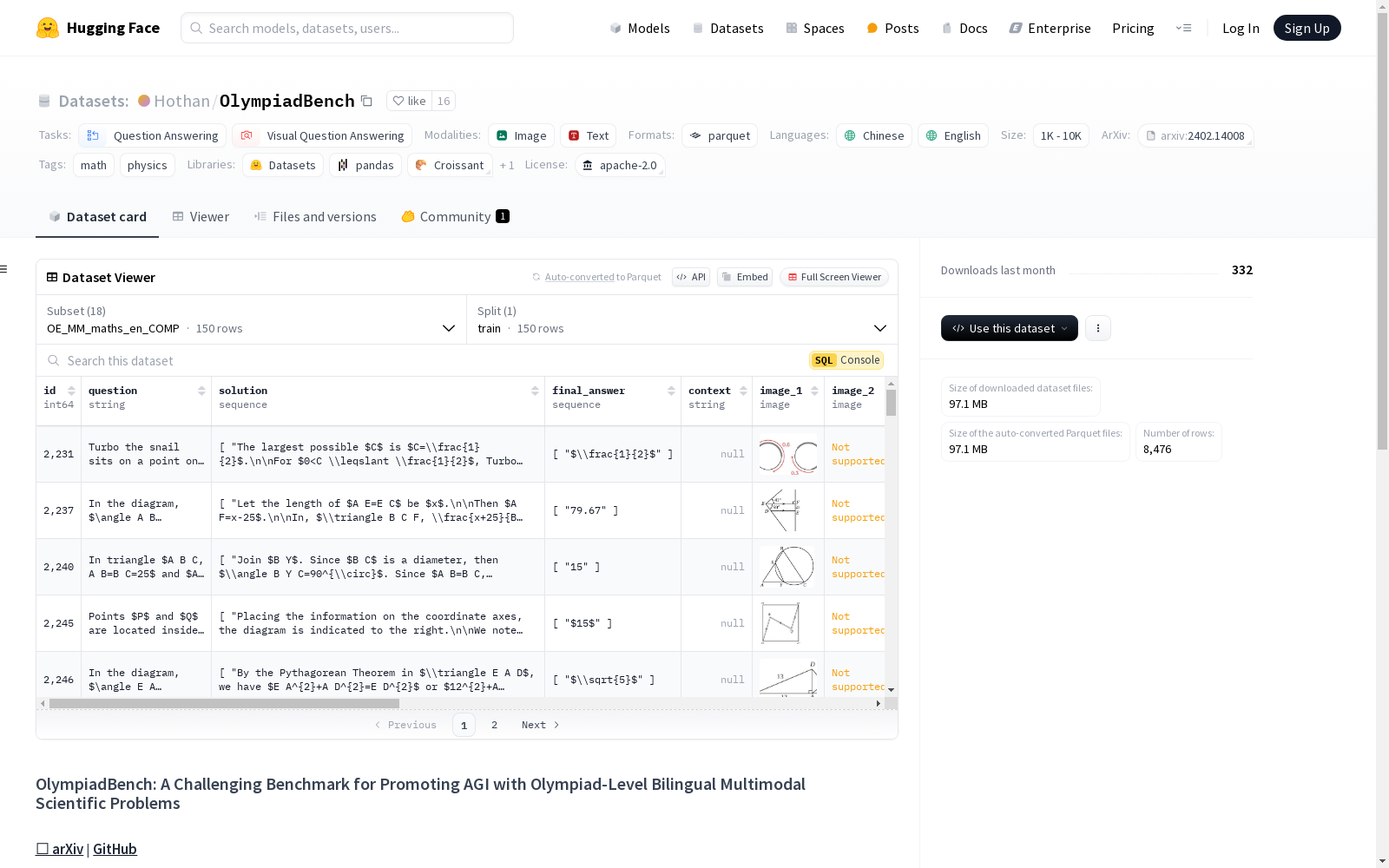
OlympiadBench
OlympiadBench 是一个奥林匹克级别的双语多模态科学问题基准,包含来自奥林匹克级别数学和物理竞赛的 8,476 个问题,其中包括中国高考。每个问题都有专家级别的逐步推理注释。表现最佳的模型 GPT-4V 在 OlympiadBench 上的平均得分仅为 17.97%,在物理学科上仅为 10.74%,突显了该基准的严格性和物理推理的复杂性。
apache-2.0
MOOCs Dataset
该数据集包含了大规模开放在线课程(MOOCs)的相关数据,包括课程信息、用户行为、学习进度等。数据主要用于研究在线教育的行为模式和学习效果。
www.kaggle.com 收录
ROBEL
ROBEL是一个开源的低成本机器人平台,专为现实世界的强化学习设计。该平台由谷歌研究院和加州大学伯克利分校共同开发,包含两个机器人:D'Claw,一个三指手机器人,用于促进精细操作任务的学习;D'Kitty,一个四足机器人,用于促进敏捷的腿式移动任务学习。这些模块化机器人易于维护且足够坚固,能够承受从零开始的硬件强化学习,目前已记录超过14000小时的训练时间。ROBEL提供了一系列连续控制基准任务,这些任务具有密集和稀疏的任务目标,并引入了硬件安全评分指标。数据集和相关材料可在www.roboticsbenchmarks.org访问,旨在解决强化学习在真实机器人上的应用问题,特别是在处理物理限制和环境交互方面的挑战。
arXiv 收录
NuminaMath-CoT
数据集包含约86万道数学题目,每道题目的解答都采用思维链(Chain of Thought, CoT)格式。数据来源包括中国高中数学练习题以及美国和国际数学奥林匹克竞赛题目。数据主要从在线考试试卷PDF和数学讨论论坛收集。处理步骤包括从原始PDF中进行OCR识别、分割成问题-解答对、翻译成英文、重新对齐以生成CoT推理格式,以及最终答案格式化。
huggingface 收录
Wind Turbine Data
该数据集包含风力涡轮机的运行数据,包括风速、风向、发电量等参数。数据记录了多个风力涡轮机在不同时间点的运行状态,适用于风能研究和风力发电系统的优化分析。
www.kaggle.com 收录
长江干流实时水位观测数据集(2024年)
该数据集为长江干流主要水文站实时水位观测数据集,包含了汉口、户口、九江、宜昌等16个水文站点的逐小时或逐日水位观测数据。 该数据集包含3个excel表格文件,长江干流站点.xls,逐日水位.xlsx,逐小时水位.xlsx。
国家地球系统科学数据中心 收录